
Image Texture/Perception-Based Haptic Model Assignment to 3D Mesh
Researchers: Mudassir Awan, Waseem Hassan, Arsen Abdulali, and Seokhee Jeon
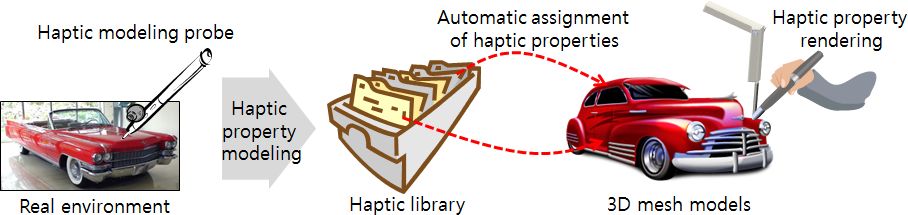
As the lack of haptic contents is one of the limitations of current haptics technology, this research aims at developing a hardware and software framework for efficient haptic model building based on actual measurement data. In this work, we develop and integrate data-driven haptic contents modeling methods for stiffness, friction, and surface texture, and construct “The Haptic Library.” Then, we seek for new perception and image-based techniques to automatically assign the acquired models into 3D mesh models.
The Haptic Library consists of One hundred textures from everyday life. These are the textures which are commonly encountered during daily life interactions. A list of all the textures can be found here.
The Haptic Library is mainly divided into three sub-categories:
To download all the Haptic Libraries, click here.
To download the code for automatic assignment algorithm, click here.
This research is a part of 촉감표준융합연구단(Meta-Touch Research Group) funded by NST Korea.
- Waseem Hassan and Seokhee Jeon, “Evaluating Differences Between Bare-handed and Tool-Based Interaction in Perceptual Space”, 2016 IEEE Haptics Symposium (HAPTICS). IEEE, 2016.
- Waseem Hassan, Arsen Abdulali, Muhammad Abdullah, Sang Chul Ahn, and Seokhee Jeon, “Towards Universal Haptic Library– Library-Based Haptic Texture Assignment Using Image Texture and Perceptual Space” IEEE Transaction on Haptics, vol. 11, No. 2, 2018.